
LeGO-LOAM-FN: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM, Faster_GICP and NDT in Complex Orchard Environments
Abstract
:1. Introduction
2. Algorithm Principle and Improvement
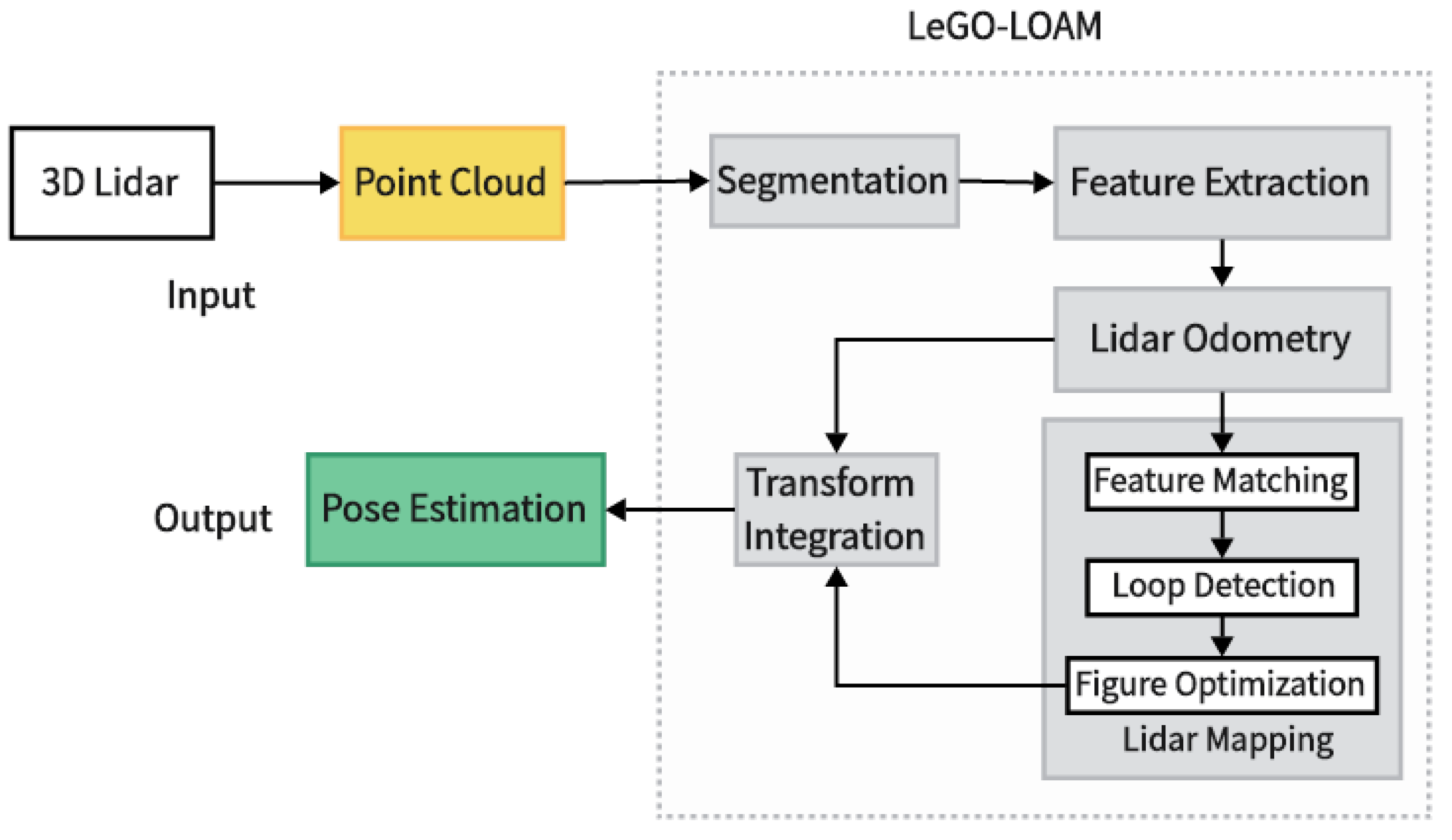
2.1. LeGO-LOAM Algorithm
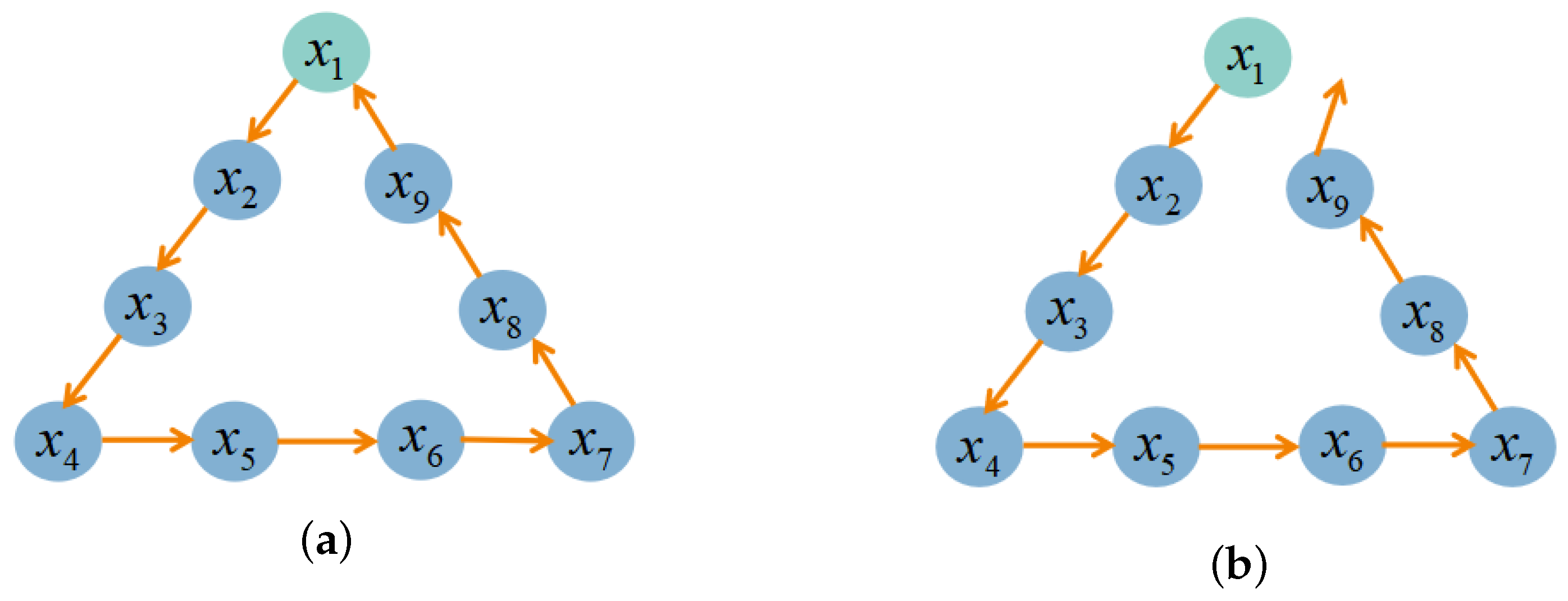
2.2. Loopback Detection Algorithm
2.3. Improved Algorithm Principle
- (1)
- The system reads the point cloud data collected by LiDAR, and the points are projected as a depth image. Then, it estimates the ground plane of the depth map, extract the ground points, and the ground points are marked as base points. Each remaining point cloud is divided into different clusters by the point cloud segmentation module and marked as segmentation points. Point cloud clusters with a number of point clouds less than 30 were filtered out and different labels were assigned to retained point cloud clusters.
- (2)
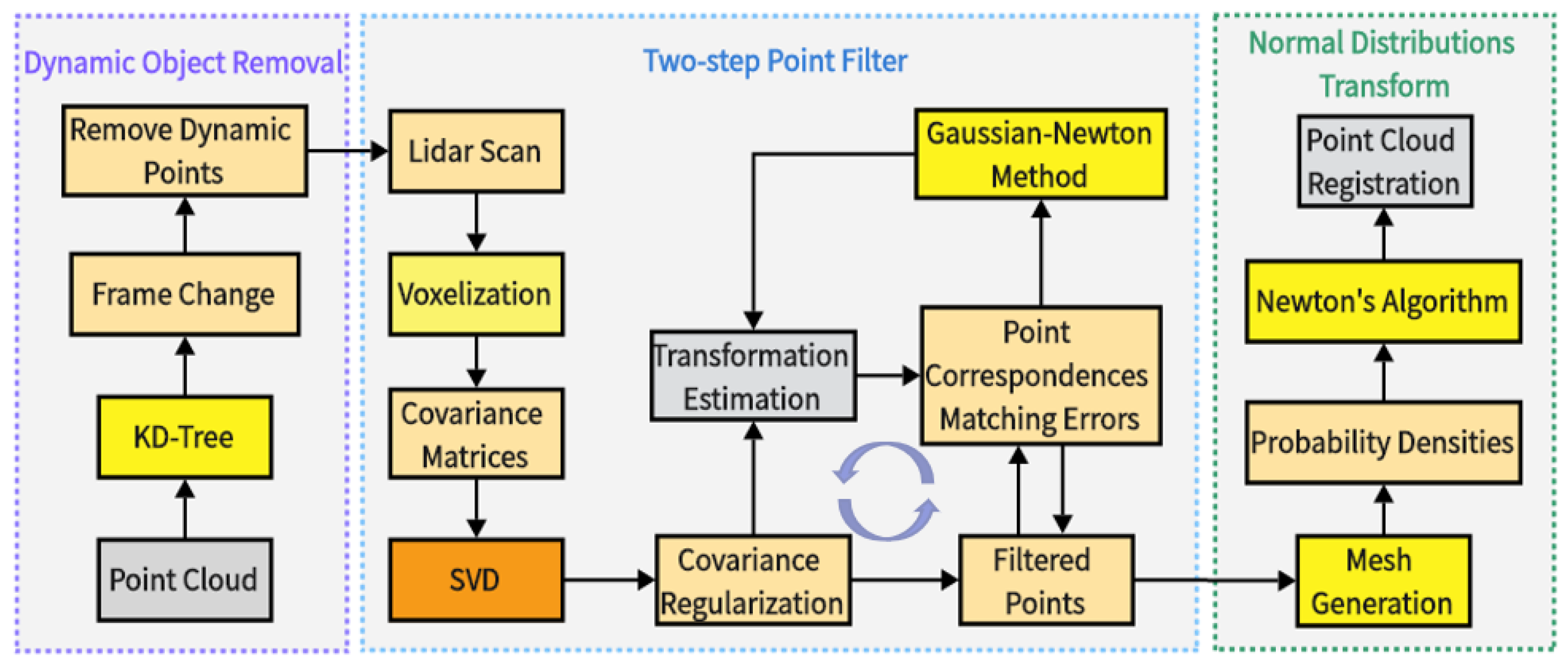
- Since dynamic objects are easy to be regarded as feature points, in order to reduce errors, the front-end odometer maintains a sub-map and uses K-Dimensional tree (KD-Tree) to establish a spatial index structure, create two vectors to store the information of the searched proximity points (one to store the index of the point, and one to store the square of the distance of the point), and set the radius search threshold to find the dynamic points to be culled out by the change between two frames.
- (3)
- A two-step point filter based on acceptance–rejection sampling is used to exclude points that rarely benefit LiDAR range performance. Specifically, the LiDAR point cloud is first filtered, retaining only points with high planarity. The process is as follows:
- (a)
- First, calculate the covariance matrix C for each point and perform the singular value decomposition (SVD):where i is the orchard point cloud serial number: . Use the transformation matrix T in the homogeneous coordinate system to describe the “displacements” and “rotations”, and use non-linear optimization (Gauss–Newton method) to find the optimal matching T. The eigenvalues are obtained and sorted in descending order, and are the corresponding eigenvector.
- (b)
- In the first step of filtering, first accept projection sampling of the orchard point cloud. Specifically, the maximum and minimum eigenvalues of and are normalized to obtain the “roughness” : the smaller the value, the better the planarity, the smaller the roughness, and the smaller the probability of being rejected; on the contrary, the larger the value of , the larger the roughness and the larger the probability of being rejected. Each point is modeled probabilistically whether it is rejected or not. Suppose that the roughness obeys the Gaussian distribution (target distribution):where is a hyperparameter that needs to be preset. Then define a proposed distribution, where the orchard LiDAR points are directly defined as a uniform distribution:where is the number of orchard feature points. In addition, it is also necessary to define a constant such that the highest point of and thus coincides with , and other values are strictly less than . If the ith orchard feature point is regarded as a sample, then the corresponding and can be calculated, and can be obtained according to the above inequality, which can be regarded as a probability value . The larger the value, the closer the sampling is to the target distribution, and it is considered that the ith feature point has the probability of obeying the distribution . Therefore, sampling on the uniform distribution of [0, 1] obtains a probability value which can be considered as a probability value ifThe ith feature point is considered to obey the distribution , which is retained. Otherwise, it will not participate in the following optimization.
- (c)
- Then, optimize the pose estimation, with further iterative filtering based on the contribution of the LiDAR points to the optimized objective function, where the matching error of the point defines its contribution. The key step in the optimization process is to construct iterative updating equations and calculate an association error for each data association result, which is defined assimilar to expression (2) defining the target Gaussian distribution , and the proposed uniform distribution and the constant , and sampling on the uniform distribution at [0, 1] obtains . The difference is that when , the correlation results are rejected because correlation results with small residuals contribute less to the pose optimization and they need to be eliminated. The sampling process reduces the number of points involved in the transform optimization process.
- (4)
- NDT registration is performed to improve accuracy so that the result after fine alignment can meet the preset constraints. The process is as follows.The filtered orchard 3D point cloud dataset is divided into a number of fixed-size 3D cubes. Each cube contains at least five point clouds, and the mean q and covariance matrix C are derived within each cube, respectively:where n is the number of point clouds in the orchard cube; i is the point cloud number ; is the point cloud in the matching orchard point cloud cube. The discrete point cloud is represented as a segmented continuously differentiable representation in the form of probability density, and then the probability density (PDF) of each point location in the orchard cube is represented by the NDT algorithm:where m is a constant. Create the probability value NDT of the first frame laser radar scanning point falling into the box, and then use the odometer to initialize. The samples of the second frame are mapped to the first scanning coordinate system according to these coordinate transformation parameters, the probability density of each point is summed and the mathematical expression of the evaluation coordinate transformation parameters isThe Hessian matrix method is used to optimize and then remapped to the loopback detection frame coordinate system until the convergence condition is satisfied. In finding the optimal solution for , it can be solved by minimizing and the problem of solving the optimal transformation of the matrix is viewed as the minimization process. Jump to expression (9) to continue the loopback until the convergence condition is satisfied and the optimal solution is obtained.
- (5)
- The transform integration module combines the results from the LiDAR odometry module and the LiDAR mapping module, and outputs the final position estimation.
3. Complex Orchard Environment Test
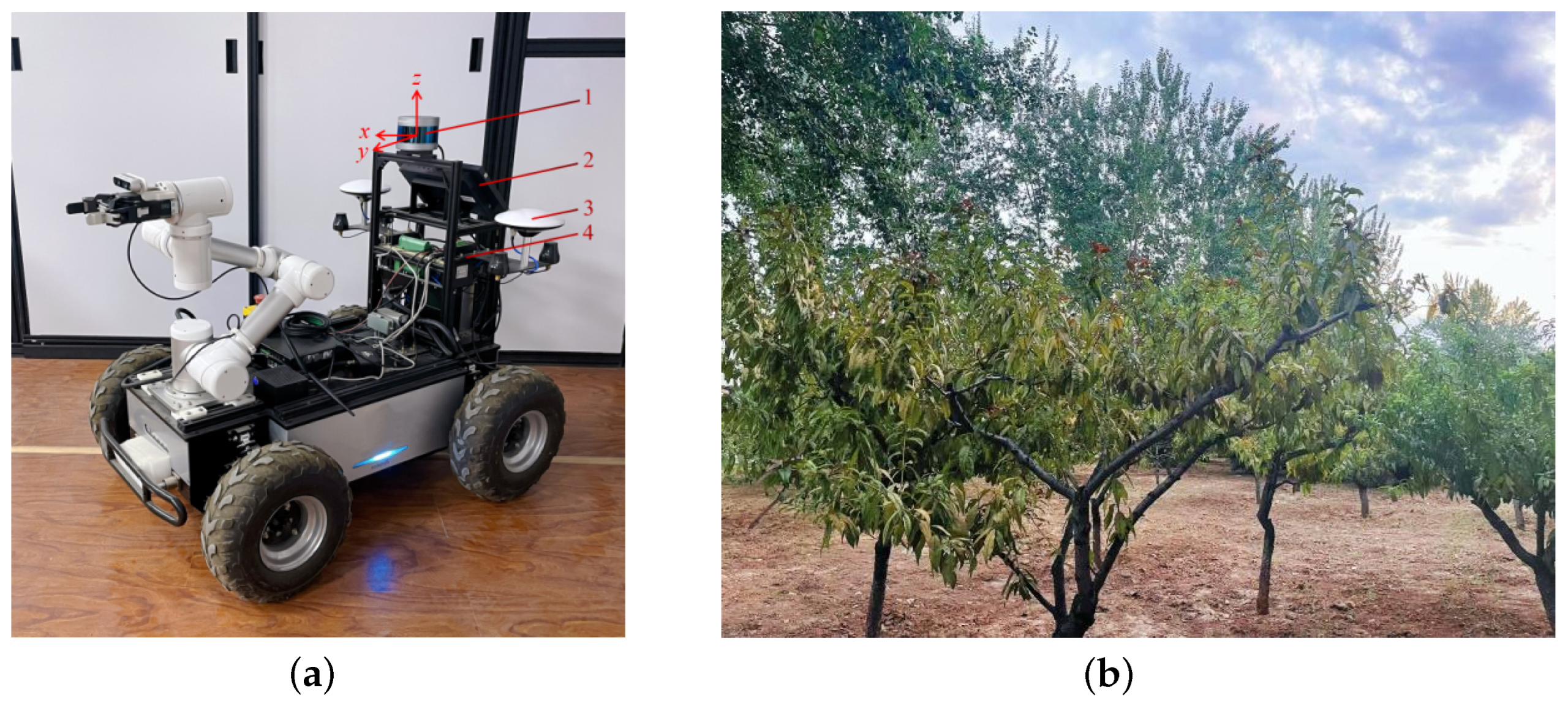
3.1. Test Equipment
3.2. Test Environment
4. Results and Analysis
4.1. Test Results
4.2. Test Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronym | Full Name |
| LeGO-LOAM-FN | An Improved Simultaneous Localization and Mapping Method Fusing |
| LeGO-LOAM, Faster_GICP, and NDT in Complex Orchard Environments | |
| Faster_GICP | Faster Generalized Iterative Closest Point |
| NDT | Normal Distributions Transform |
| KD-Tree | K-Dimensional Tree |
| LeGO-LOAM | Lightweight and Ground-Optimized LiDAR Odometry and Mapping on |
| Variable Terrain | |
| SLAM | Simultaneous Localization and Mapping |
| KF | Kalman Filter |
| SVSF | Kalman Smooth Variable Structure Filter |
| GNSS | Global Navigation Satellite System |
| LOAM | LiDAR Odometry and Mapping in Real Time |
| ICP | Iterative Closest Point |
| ROS | Robot Operating System |
| L-M | Levenberg-Marquardt |
| A-LOAM | Advanced LiDAR Odometry And Mapping |
| LIO-SAM | Tightly Coupled LiDAR Inertial Odometry via Smoothing and Mapping |
| ATE | Absolute Trajectory Error |
| RMSE | Root Mean Square Error |
| STD | Standard Deviation |
References
- Yao, C.; Shi, W.; Liu, C.; Chen, H.; Chen, Q. Overview of mobile robot navigation technology. Sci. Sin. Inf. 2023, 53, 2303–2324. [Google Scholar] [CrossRef]
- Wang, H.; Chen, L.; Chaoui, H.; Wang, Y. Introduction to the special section on emerging technologies in navigation, control and sensing for agricultural robots: Computational intelligence and artificial intelligence solutions. Comput. Electr. Eng. 2023, 112, 109007. [Google Scholar] [CrossRef]
- Ji, Y.; Li, H.; Zhang, M.; Wang, Q.; Wang, K. Navigation System for Inspection Robot Based on LiDAR. Trans. Chin. Soc. Agric. Mach. 2018, 49, 14–21. [Google Scholar]
- Huang, L. Review on LiDAR-based SLAM Techniques. In Proceedings of the 2021 International Conference on Signal Processing and Machine Learning (CONF-SPML), Stanford, CA, USA, 14 November 2021; pp. 163–168. [Google Scholar]
- Cao, S.; Lu, X.; Shen, S. GVINS: Tightly Coupled GNSS–Visual–Inertial Fusion for Smooth and Consistent State Estimation. IEEE Trans. Robot. Publ. IEEE Robot. Autom. Soc. 2022, 38, 2004–2021. [Google Scholar] [CrossRef]
- Demim, F.; Nemra, A.; Louadj, K. Robust SVSF-SLAM for Unmanned Vehicle in Unknown Environment. IFAC-PapersOnLine 2016, 49, 386–394. [Google Scholar] [CrossRef]
- Li, D.; Bao, J. Research progress on key technologies of underwater operation robot for aquaculture. Trans. Chin. Soc. Agric. Eng. 2018, 34, 1–9. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct Sparse Odometry. arXiv 2016, arXiv:1607.02565. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2017, 34, 1–17. [Google Scholar] [CrossRef]
- Melo-Pinto, P. Real-Time 3D Object Detection and SLAM Fusion in a Low-Cost LiDAR Test Vehicle Setup. Sensors 2021, 21, 8381. [Google Scholar]
- Zheng, L.; Fu, Z. BALM: Bundle Adjustment for Lidar Mapping. In Proceedings of the International Conference on Robotics and Automation, Xian, China, 30 May–5 June 2021; Volume 6, pp. 3184–3191. [Google Scholar]
- Chen, S.; Guo, Y.; Gao, T.; Gong, Q.; Zhang, J. RGB-D Visual SLAM Algorithm for Mobile Robots. Trans. Chin. Soc. Agric. Mach. 2018, 49, 38–45. [Google Scholar]
- Zhang, T.; Zhang, H.; Li, Y.; Nakamura, Y.; Zhang, L. FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical Flow. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Campos, C.; Elvira, R.; Rodriguez, J.J.G.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM. IEEE Trans. Robot. Publ. IEEE Robot. Autom. Soc. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Xue, G.H.; Li, R.X.; Zhang, Z.H.; Liu, R. Research status and development trend of SLAM algorithm based on 3D lidar. Inf. Control 2023, 52, 19. [Google Scholar]
- Shi, Y.; Wang, H.; Yang, T.; Liu, L.; Cui, Y. Integrated Navigation by a Greenhouse Robot Based on an Odometer/Lidar. Instrum. Mes. Metrol. 2020, 19, 91–101. [Google Scholar] [CrossRef]
- Hu, D.D.; Yu, P.R.; Yue, F.F. Multi-sensor mapping method for indoor degraded environment. Appl. Res. Comput. 2021, 38, 1800–1808. [Google Scholar]
- Tong, G.F.; Zhange, J.W.; Liu, M.T.; Yue, X.Y. SLAM algorithm based on efficient loop detection and relocalization. Control Decis. 2020, 35, 587–592. [Google Scholar]
- Kang, J.M.; Zhao, X.M.; Xu, Z.G. Loop closure detection of unmanned vehicle trajectory based on geometric relationship between features. China J. Highw. Transp. 2017, 30, 121–128+135. [Google Scholar]
- Wang, Y.; Sun, Z.; Xu, C.Z.; Sarma, S.E.; Yang, J.; Kong, H. LiDAR Iris for Loop-Closure Detection. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 5769–5775. [Google Scholar]
- Zhong, S.; Qi, Y.; Chen, Z.; Wu, J.; Chen, H.; Liu, M. DCL-SLAM: A Distributed Collaborative LiDAR SLAM Framework for a Robotic Swarm. IEEE Sens. J. 2023. [Google Scholar] [CrossRef]
- He, L.; Wang, X.; Zhang, H. M2DP: A novel 3D point cloud descriptor and its application in loop closure detection. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 231–237. [Google Scholar]
- Qiang, L.; Liu, J. IM2DP: An intensity-based approach to loop closure detection and optimization for LiDAR mapping. In Proceedings of the Conference on Computer Graphics, Artificial Intelligence, and Data Processing, Washington, DC, USA, 7–14 February 2023. [Google Scholar]
- Chen, X.; Läbe, T.; Milioto, A.; Röhling, T.; Vysotska, O.; Haag, A.; Behley, J.; Stachniss, C. OverlapNet: Loop Closing for LiDAR-based SLAM. In Proceedings of the Robotics: Science and Systems XVI. Robotics: Science and Systems Foundation, Virtually, 12–16 July 2020. [Google Scholar]
- Chen, X.; Lbe, T.; Milioto, A.; Rhling, T.; Behley, J.; Stachniss, C. OverlapNet: A siamese network for computing LiDAR scan similarity with applications to loop closing and localization. Auton. Robots 2022, 46, 61–81. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the Robotics: Science and Systems Conference, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- Zhang, J.; Singh, S. Low-Drift and Real-Time Lidar Odometry and Mapping. Auton. Robots 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Rusinkiewicz, S. A Symmetric Objective Function for ICP. ACM Trans. Graph. 2019, 38, 85. [Google Scholar] [CrossRef]
- Bin, W.; Zhang, Z.; He, X. Resilient LiDAR SLAM Algorithm Based on Normal Distributions Transform and Line-Plane ICP; Geomatics and Information Science of Wuhan University: Wuhan, China, 2023. [Google Scholar]
- Wang, Z.; Liu, G. Improved LeGO-LOAM Method Based on Outlier Points Elimination. Measurement 2023, 31, 14. [Google Scholar] [CrossRef]
- Yu, Y.W.; Wang, k.; Du, L.Q.; Qu, B. The matching point pairs of the point cloud model. Opt. Precis. Eng. 2023, 31, 14. [Google Scholar] [CrossRef]
- Man, Z.; Yuhan, J.; Shichao, L.; Ruyue, C.; Hongzhen, X.; Zhenqian, Z. Research progress of agricultural machinery navigation technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 18. [Google Scholar]
- Geng, L.J.; Gu, J.; Bie, X.T.; Ran, W.X.; Lan, Y.B. Research on orchard SLAM method based on Scan Context and NDT-ICP fusion. J. Chin. Agric. Mech. 2022, 43, 44–50. [Google Scholar]
- Wang, J.; Xu, M.; Foroughi, F.; Dai, D.; Chen, Z. FasterGICP: Acceptance-Rejection Sampling Based 3D Lidar Odometry. IEEE Robot. Autom. Lett. 2022, 7, 255–262. [Google Scholar] [CrossRef]
- Das, A.; Waslander, S.L. Scan registration with multi-scale k-means normal distributions transform. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 2705–2710. [Google Scholar]
- Einhorn, E.; Gross, H.M. Generic NDT mapping in dynamic environments and its application for lifelong SLAM. Robot. Auton. Syst. 2015, 69, 28–39. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A Review of Multi-Sensor Fusion SLAM Systems Based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | Algorithm | Path Length (m) | Time Consumption (s) | The CPU Occupancy Rate (%) | RMSE (m) | STD (m) |
|---|---|---|---|---|---|---|
| Kitti00 (4541) | A-LOAM | 3737.584 | 558.365 | 69 | 7.81 | 4.13 |
| LIO-SAM | 3728.573 | 563.882 | 63 | 3.61 | 1.91 | |
| LeGO-LOAM | 3731.198 | 570.167 | 65 | 5.04 | 2.04 | |
| LeGO-LOAM-FN | 3727.482 | 541.702 | 61 | 2.36 | 0.88 | |
| #1 (1870) | A-LOAM | 161.227 | 195.835 | 59 | 0.87 | 0.54 |
| LIO-SAM | 157.836 | 196.433 | 56 | 0.19 | 0.10 | |
| LeGO-LOAM | 158.209 | 201.961 | 557 | 0.21 | 0.11 | |
| LeGO-LOAM-FN | 155.437 | 192.382 | 53 | 0.16 | 0.08 | |
| #2 (4604) | A-LOAM | 440.294 | 488.274 | 65 | 1.62 | 1.05 |
| LIO-SAM | 449.869 | 497.239 | 63 | 0.45 | 0.34 | |
| LeGO-LOAM | 445.286 | 489.977 | 61 | 0.39 | 0.23 | |
| LeGO-LOAM-FN | 437.761 | 469.536 | 56 | 0.25 | 0.14 | |
| #3 (2334) | A-LOAM | 231.802 | 341.463 | 67 | 2.01 | 1.47 |
| LIO-SAM | 223.293 | 343.803 | 63 | 1.47 | 1.21 | |
| LeGO-LOAM | 226.875 | 339.368 | 62 | 1.36 | 0.98 | |
| LeGO-LOAM-FN | 217.663 | 321.779 | 59 | 0.45 | 0.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Chen, S.; Xue, Q.; Yang, J.; Ren, G.; Zhang, W.; Li, F. LeGO-LOAM-FN: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM, Faster_GICP and NDT in Complex Orchard Environments. Sensors 2024, 24, 551. https://doi.org/10.3390/s24020551
Zhang J, Chen S, Xue Q, Yang J, Ren G, Zhang W, Li F. LeGO-LOAM-FN: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM, Faster_GICP and NDT in Complex Orchard Environments. Sensors. 2024; 24(2):551. https://doi.org/10.3390/s24020551
Chicago/Turabian StyleZhang, Jiamin, Sen Chen, Qiyuan Xue, Jie Yang, Guihong Ren, Wuping Zhang, and Fuzhong Li. 2024. "LeGO-LOAM-FN: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM, Faster_GICP and NDT in Complex Orchard Environments" Sensors 24, no. 2: 551. https://doi.org/10.3390/s24020551